ホーム
>>
RSSセンター
>>
どんな形の飛行機でも飛ぶんです! その3

 飛行中年
(2025/4/16 10:05:54)
飛行中年
(2025/4/16 10:05:54)
 どんな形の飛行機でも飛ぶんです! その3
(2016/6/11 9:46:50)
どんな形の飛行機でも飛ぶんです! その3
(2016/6/11 9:46:50)
RSSセンター
| メイン | 簡易ヘッドライン |
飛行中年
(2025/4/16 10:05:54)
どんな形の飛行機でも飛ぶんです! その3
(2016/6/11 9:46:50)
前回ご説明できなかった、飛行機の自立安定性のなかのピッチについて、今回ご説明いたします。
前回で、飛行機の自立安定性の中でロールとヨーについてはご理解いただけたと思います。
残りはピッチですが、これについてもとても単純でわかりやすい要素で自立安定性を持たせることができます。
それは…。
下図をご覧ください!
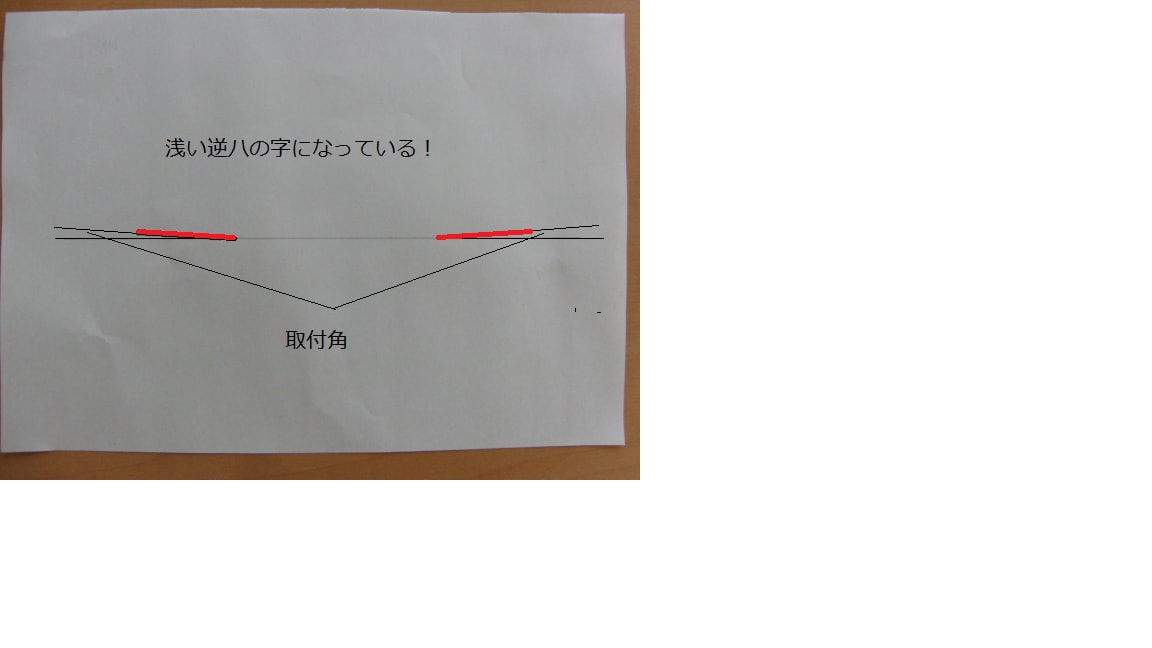
この図は飛行機の翼の取り付け角を表したものなんですが…。
前の翼と後ろの翼、この双方の角度の関係が、浅い「逆ハの字」になっていればピッチの自立安定性が生まれます!
この角度の関係は、相対的にこうなっていればよく、片方の取り付け角が機体の基準線に対して0度の取り付け角でも、もう片方で逆ハの字を形成できる取り付け角ならば問題ありません。
詳しい理論については割愛しますが、飛行機の翼はこの角度の関係があり…。
前後の翼の面積がそれなりにあり…。
ある程度重心位置があっている…。
これらの要素が揃っていれば、ピッチの自立安定が保てたまま空を飛ぶことができるんです!
具体的に、飛行機には様々な形のものがあるんですが、それらはすべて上に述べる「逆ハの字」の法則が成立しているんです。
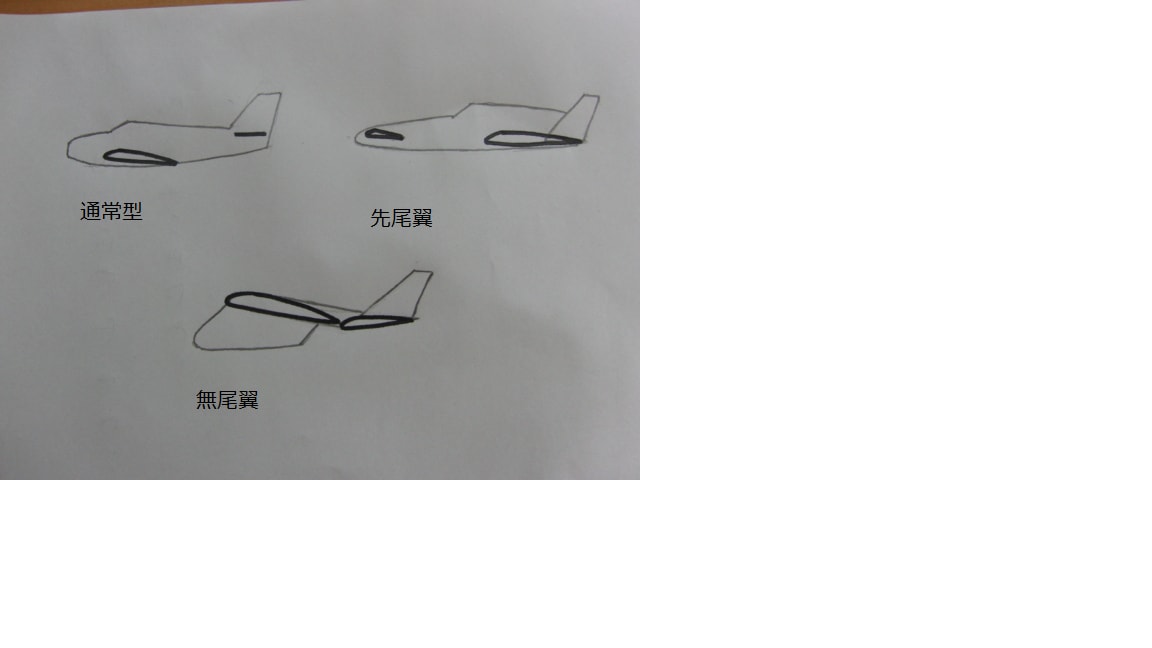
上の図のように、通常型の飛行機、先尾翼機、無尾翼機 すべてがそのようになっています。
つまり、これら以外の奇想天外な形の飛行機を作ろうとした場合でも、この法則を守ればちゃんとピッチの自立安定性を作り出すことができるんです!
前回からの自立安定性の話をまとめてみますと…。
ロールの自立安定性のために、上反角、あるいは後退角がある。
ヨーの自立安定性のために垂直尾翼、あるいは、重心位置より後ろの抵抗が大きくなっている。
ピッチの自立安定性のために、前後の翼の取り付け角が「逆ハの字」になっている。
たったこれだけで、飛行機はピッチ、ロール、ヨーの3軸すべての自立安定性を持つことができ、空を飛ぶことが可能になるんです!
どうです?飛行機って小難しい理論で飛んでいる!って思いがちなんですが、実は極めて単純な原則さえ守っていれば、自由な発想でデザインしてもちゃんと飛ぶものができるんです。
…。
さて、空を飛ぶものの自立安定性についてお話ししましたが、実は最近この法則にしたがっていない飛行体が社会に注目されています。
それが…。
ドローンなんです。

ドローンは実は上記でご説明した自立安定を、すべてセンサーとコンピュータでまかなっています。
ドローンには通常4つ程度のローターがあります。
現在の進化した、ジャイロやGPSなどで姿勢や位置を検出し、それをコンピュータが計算し、複数あるローターを個々に細かく制御して飛んでしまう…。つまり、自立安定性をすべて電子制御で行ってしまっています。
ドローンまではいかないにしても、コンピュータがこれだけ進化した現在、通常の飛行機でもかなりドローンと同じように自立安定性の電子制御化が進んできているようです。
つまり、もともと持っていた自立安定性をコンピュータが助ける形で、今までよりも飛行機が高性能化しているという言い方もできると思います。
さて、ちょっと話が脱線しそうなんですが、上に出てきたドローン。
現在はすべてを電気の力で飛行している関係で、バッテリーの消耗が激しく、長時間飛べない欠点があります。
また、電動で空を飛ばせる関係上、その大型化にも限界があります。
でも、これって、単純にエンジンと電気のハイブリットドローンを作れば良いようにも思えるのですが…。
例えば、中央で二重反転のエンジン動力のローターを持ち、その四方に姿勢制御だけを受け持つ電動モーターのローターを持つドローンは作れないのか…。
あるいは、もっと単純に考えて、補助の浮力を得るという意味では、動きの少ない目的で使用するドローンならば、風船をつけるという単純な
手法だけでも大幅に飛行時間が伸ばせるのではないか…。
私は素人なんでよくわからないんですが、これって難しいんですかね…。
前回で、飛行機の自立安定性の中でロールとヨーについてはご理解いただけたと思います。
残りはピッチですが、これについてもとても単純でわかりやすい要素で自立安定性を持たせることができます。
それは…。
下図をご覧ください!
この図は飛行機の翼の取り付け角を表したものなんですが…。
前の翼と後ろの翼、この双方の角度の関係が、浅い「逆ハの字」になっていればピッチの自立安定性が生まれます!
この角度の関係は、相対的にこうなっていればよく、片方の取り付け角が機体の基準線に対して0度の取り付け角でも、もう片方で逆ハの字を形成できる取り付け角ならば問題ありません。
詳しい理論については割愛しますが、飛行機の翼はこの角度の関係があり…。
前後の翼の面積がそれなりにあり…。
ある程度重心位置があっている…。
これらの要素が揃っていれば、ピッチの自立安定が保てたまま空を飛ぶことができるんです!
具体的に、飛行機には様々な形のものがあるんですが、それらはすべて上に述べる「逆ハの字」の法則が成立しているんです。
上の図のように、通常型の飛行機、先尾翼機、無尾翼機 すべてがそのようになっています。
つまり、これら以外の奇想天外な形の飛行機を作ろうとした場合でも、この法則を守ればちゃんとピッチの自立安定性を作り出すことができるんです!
前回からの自立安定性の話をまとめてみますと…。
ロールの自立安定性のために、上反角、あるいは後退角がある。
ヨーの自立安定性のために垂直尾翼、あるいは、重心位置より後ろの抵抗が大きくなっている。
ピッチの自立安定性のために、前後の翼の取り付け角が「逆ハの字」になっている。
たったこれだけで、飛行機はピッチ、ロール、ヨーの3軸すべての自立安定性を持つことができ、空を飛ぶことが可能になるんです!
どうです?飛行機って小難しい理論で飛んでいる!って思いがちなんですが、実は極めて単純な原則さえ守っていれば、自由な発想でデザインしてもちゃんと飛ぶものができるんです。
…。
さて、空を飛ぶものの自立安定性についてお話ししましたが、実は最近この法則にしたがっていない飛行体が社会に注目されています。
それが…。
ドローンなんです。
ドローンは実は上記でご説明した自立安定を、すべてセンサーとコンピュータでまかなっています。
ドローンには通常4つ程度のローターがあります。
現在の進化した、ジャイロやGPSなどで姿勢や位置を検出し、それをコンピュータが計算し、複数あるローターを個々に細かく制御して飛んでしまう…。つまり、自立安定性をすべて電子制御で行ってしまっています。
ドローンまではいかないにしても、コンピュータがこれだけ進化した現在、通常の飛行機でもかなりドローンと同じように自立安定性の電子制御化が進んできているようです。
つまり、もともと持っていた自立安定性をコンピュータが助ける形で、今までよりも飛行機が高性能化しているという言い方もできると思います。
さて、ちょっと話が脱線しそうなんですが、上に出てきたドローン。
現在はすべてを電気の力で飛行している関係で、バッテリーの消耗が激しく、長時間飛べない欠点があります。
また、電動で空を飛ばせる関係上、その大型化にも限界があります。
でも、これって、単純にエンジンと電気のハイブリットドローンを作れば良いようにも思えるのですが…。
例えば、中央で二重反転のエンジン動力のローターを持ち、その四方に姿勢制御だけを受け持つ電動モーターのローターを持つドローンは作れないのか…。
あるいは、もっと単純に考えて、補助の浮力を得るという意味では、動きの少ない目的で使用するドローンならば、風船をつけるという単純な
手法だけでも大幅に飛行時間が伸ばせるのではないか…。
私は素人なんでよくわからないんですが、これって難しいんですかね…。
execution time : 0.006 sec